Hinge test v2 by Anthromod
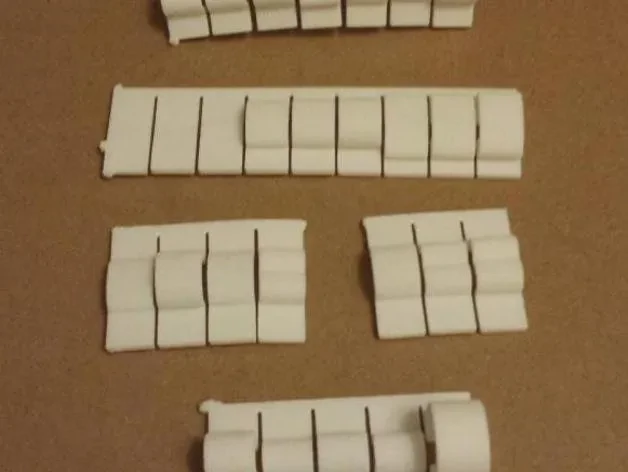
Continuing my investigation into SLS nylon spring hinges for my robot hands. These particular hinges are 10mm wide and typically 1.5mm thin in the spring. Although none of the springs are ideal, when combined with my earlier tests with thinner and narrower springs they are teaching me a great deal. On a separate note I'm researching how to FEA (finite element analysis) model the sls nylon, so that in future I can design more quickly. If anyone knows a good place to look then that would help. Oh I also threw in a stripped down finger mechanism for the new hand I'm designing. It keeps all the necessary tendon guide lines, whilst removing all but the minimum support. You can follow my progress on twitter @Anthromod My website is at www.anthromod.com
Download from thingiverse